 Close
Close

SERV-CT: A disparity dataset from CT for validation of endoscopic 3D reconstruction
Overview
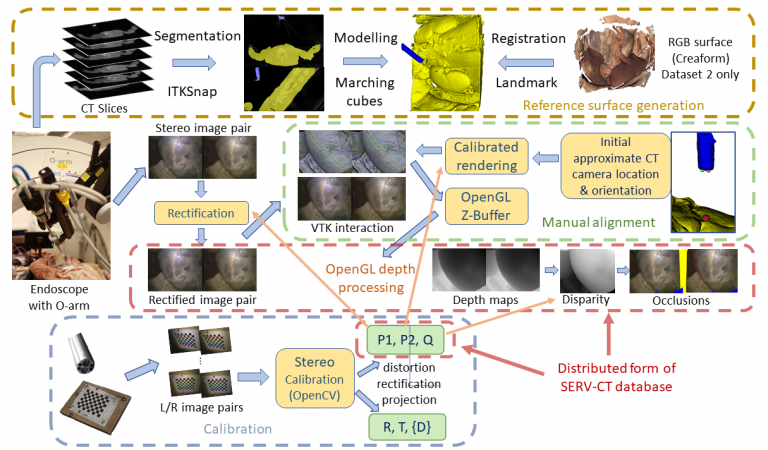
This data set has been submitted for publication in Medical Image Analysis under the title “SERV-CT: A disparity dataset from CT for validation of endoscopic 3D reconstruction.” The dataset contains 16 stereoendoscopic image pairs with reference anatomical segmentation derived from CT. Two different ex vivo porcine samples were imaged using the straight and 30° endoscopes from the original classic da Vinci™ Surgical System (Intuitive Inc., Sunnyvale, US)

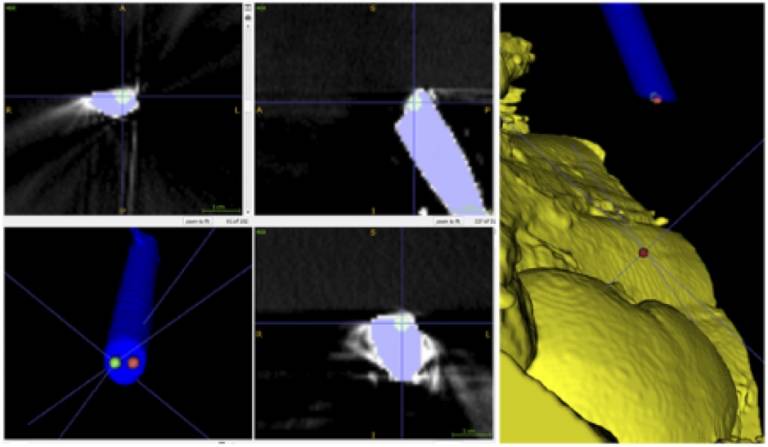
A reference is provided by a CT scan from the O-arm™ system (Medtronic Inc, Dublin, Ireland). The scan contains both the anatomy and the endoscope, facilitating constrained manual alignment to provide pose of the viewed anatomical surface relative to the endoscope.
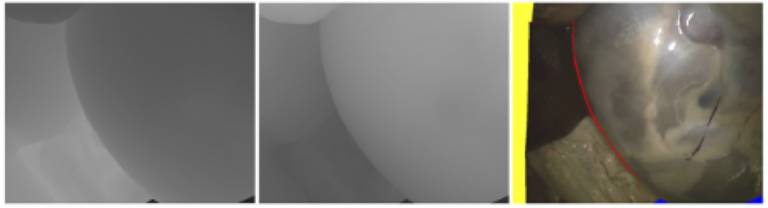
The reference is provided as rectified stereo pairs with corresponding disparity and depth as well as labels for overlap region and occlusions.
Downloading the Dataset and Evaluation Code
Please download the data from the UCL Data Repository.
License
The SERV-CT Dataset is licensed under a Creative Commons Attribution 4.0 International (CC BY 4.0).
Citing the Dataset
Please cite the following publication whenever research making use of this dataset is reported in any academic publication or research report:
@article{edwards2020serv,
title={SERV-CT: A disparity dataset from CT for validation of endoscopic 3D reconstruction},
author={Edwards, PJ and Psychogyios, Dimitris and Speidel, Stefanie and Maier-Hein, Lena and Stoyanov, Danail},
journal={arXiv preprint arXiv:2012.11779},
year={2020}
}
The following publication is also associated with this work.
Stoyanov, D., Scarzanella, M.V., Pratt, P., Yang, G.Z., 2010. Real-time stereo reconstruction in robotically assisted minimally invasive surgery, in: International Conference on Medical Image Computing and Computer-Assisted Intervention, Springer. pp. 275–282
Contact
For comments, suggestions or feedback, or if you experience any problems with this website or the dataset, please contact Dimitris Psychogyios or Eddie Edwards.