 Close
Close

The first publicly available dataset of localized AFM measurements of bulk tissue elastic modulus.
Overview
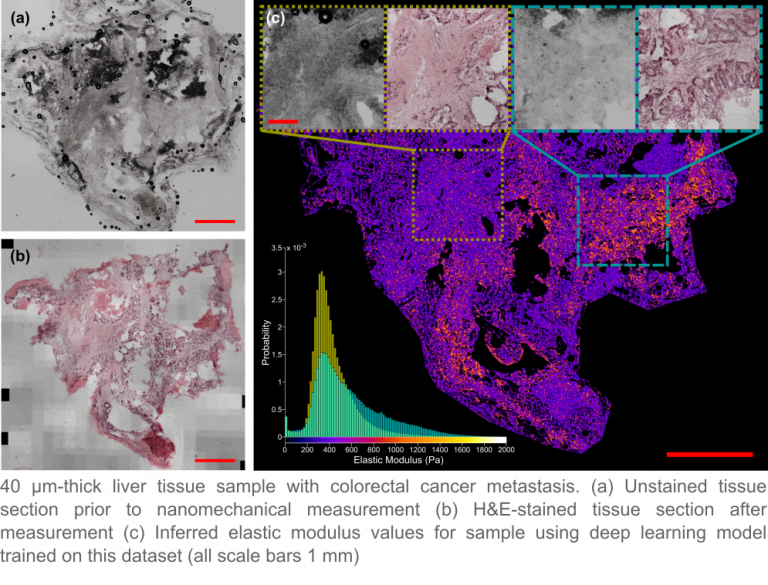
This dataset consists of 27 tissue samples collected from 7 patients suffering from colorectal or pancreatic cancer metastasis who underwent curative liver resection surgery. Tissue punches were collected from healthy and tumour regions during surgery. Each section was measured using an atomic force microscope (AFM) to extract the elastic modulus of the tissue at multiple sites. Microscope images were captured of the whole sample as well as at each measurement site, allowing for spatial localization of each measurement. In some cases, the section was stained post-hoc with haemotoxylin and eosin (H&E), providing ground-truth validation of tissue pathology.
There are two datasets available:
- The full liver tissue dataset (46.4 GB), which for each sample contains:
- Raw and processed AFM measurement data for each measurement site (multiple formats: .csv and .mat for processed data)
- 4X microscopy image of the unstained tissue sample (RGB TIFF)
- 4X microscopy images of each measurement site (RGB TIFFs)
- Annotated image showing spatially localized measurement sites (RGB TIFF)
- MATLAB workspaces of the registration results (.mat)
- 20X microscopy image of the post-measurement stained sample (RGB TIFF)
(Note: not all samples contain stained images) - Predicted whole-sample elastic modulus maps produced by a GAN detailed here (32-bit float TIFF)
- The image patch training dataset (8.84 MB):
- 308 training and 78 validation sets, each containing:
- 64 x 64-pixel unstained tissue sample image patches (8-bit grayscale)
- 32 x 32-pixel tissue topology maps (32-bit float)
- 32 x 32-pixel elastic modulus maps (32-bit float)
- 308 training and 78 validation sets, each containing:
Downloading the Dataset
This dataset is publicly available. If you wish to download this dataset, please click here.
License
The AFM Liver Tissue Dataset is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0).
Contact
For comments, suggestions or feedback, or if you experience any problems with this website or the dataset, please contact Lydia Neary-Zajiczek.
To find out more about our research team, visit the Surgical Robot Vision, TouchLab and WELLCOME/EPSRC Centre for Interventional and Surgical Science websites.